

電機(jī)品牌")
超聲波電動機(jī)在汽油發(fā)電機(jī)中的應(yīng)用
控制系統(tǒng)原理及構(gòu)成
便攜式汽油發(fā)電機(jī)屬于同步電動機(jī)類型,如果沒有自動調(diào)壓裝置,在工作的過程中會出現(xiàn)因?yàn)樨?fù)載增加導(dǎo)致輸出電壓下降的現(xiàn)象。
通常的解決辦法就是手動加大油門,提高汽油機(jī)的輸出功率。顯然這是很不方便和很不精確的。為了實(shí)現(xiàn)這種發(fā)電機(jī)自動調(diào)壓的目的,就要在工作過程中引入反饋環(huán)節(jié),并選擇調(diào)節(jié)油門的執(zhí)行機(jī)構(gòu)。超聲波電動機(jī)具有響應(yīng)快、定位精度高、結(jié)構(gòu)靈活等優(yōu)點(diǎn),是調(diào)節(jié)油門執(zhí)行機(jī)構(gòu)的最佳選擇。表1給出了系統(tǒng)中汽油發(fā)電機(jī)的性能指標(biāo)。

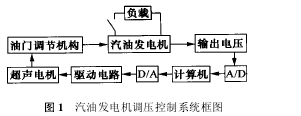
圖1為該汽油發(fā)電機(jī)調(diào)壓控制系統(tǒng)框圖。由圖可知,該系統(tǒng)由TRUM-45型超聲波電動機(jī)、汽油發(fā)電機(jī)、PC機(jī)和A/D、D/A等組成。計算機(jī)通過模數(shù)轉(zhuǎn)換接口以20Hz的頻率對發(fā)電機(jī)的輸出電壓進(jìn)行采樣,經(jīng)處理后發(fā)出控制指令,驅(qū)動超聲波電動機(jī)調(diào)節(jié)油門,改變發(fā)電機(jī)的轉(zhuǎn)速,從而使輸出電壓穩(wěn)定在指定的范圍之內(nèi)。
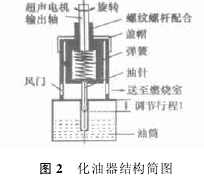
普通化油器中的油門調(diào)節(jié)是拉動與油針固聯(lián)在一起的一根鋼絲索,使得油針上下運(yùn)動,達(dá)到調(diào)節(jié)進(jìn)油量的目的。本文則是通過螺紋和螺桿的配合,將超聲波電動機(jī)的旋轉(zhuǎn)運(yùn)動轉(zhuǎn)變?yōu)橛歪樀纳舷逻\(yùn)動,從而達(dá)到調(diào)節(jié)進(jìn)油量的目的。其調(diào)節(jié)油門的機(jī)構(gòu)如圖2所示。
油門控制策略
由于整個控制系統(tǒng)中包含有超聲波電動機(jī)和汽油發(fā)電機(jī)兩部分,所以該系統(tǒng)是時變和非線性的,無法建立該控制系統(tǒng)的精確模型。為了得到良好的控制性能,采用模糊控制的策略。因?yàn)槟:刂葡到y(tǒng)可以不依賴于系統(tǒng)的精確的數(shù)學(xué)模型,特別適合參數(shù)未知的不確定性對象或存在各種擾動的模糊性對象進(jìn)行控制。為了實(shí)現(xiàn)系統(tǒng)的模糊控制,我們根據(jù)下面的規(guī)則來選取油門模糊控制器的參數(shù):
a、取發(fā)電機(jī)的實(shí)際輸出電壓和指定輸出電壓的差值及其隨時間的變化率為輸入量,取油門調(diào)節(jié)機(jī)構(gòu)中的超聲波電動機(jī)的控制電壓為輸出量。該系統(tǒng)是兩輸入一輸出系統(tǒng)。
b、系統(tǒng)的基本論域?yàn)殡妷翰钪导捌渥兓实姆秶?如由開環(huán)加負(fù)載的實(shí)驗(yàn)可知電壓差值的變化范圍是[-2,+2]。模糊集的論域取[-4,+4],則可以得到量化因子的值為k=0.5。
c、誤差輸入的隸屬度函數(shù)如圖3所示,取高斯分布。誤差變化率和輸出的隸屬度函數(shù)與之相似。語言變量取pb, ps, zo, ns, nb,分別表示正大,正小,零,負(fù)小,負(fù)大。
中語言變量電壓誤差的隸屬度函數(shù)")
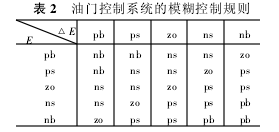
d、控制系統(tǒng)的控制規(guī)則如表2所示。
e、模糊控制量的去模糊采取重心法,同時根據(jù)超聲波電動機(jī)的電壓控制范圍確定比例因子為0.25。
負(fù)載實(shí)驗(yàn)的結(jié)果
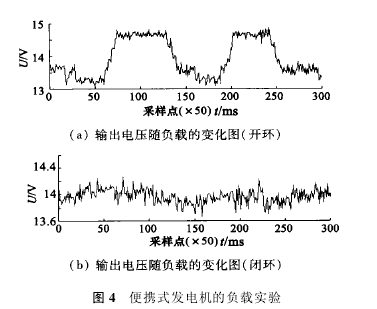
在實(shí)驗(yàn)的過程中,通過繼電器開關(guān),每隔2s給發(fā)電機(jī)的輸出端加載一次150W的電爐絲,通過讀取A/D口的輸出數(shù)據(jù)可以得到圖4的結(jié)果。
從負(fù)載實(shí)驗(yàn)可以看出:
在油門調(diào)節(jié)機(jī)構(gòu)不工作時,發(fā)電機(jī)的輸出電壓有±0.5V的波動,是由于發(fā)電機(jī)本身的性能如汽油燃燒不均勻所引起的,不在本文的討論范圍之內(nèi)。
發(fā)電機(jī)在接入150W的負(fù)載時,若不加控制,電壓平均值的波動在13.8V±0.7V之間波動,隨著負(fù)載功率增加,輸出電壓急劇降低;在閉環(huán)系統(tǒng)中,電壓平均值穩(wěn)定在14.0V?0.2V。所以通過該控制器的作用,可明顯地提高發(fā)電機(jī)在其負(fù)載變化時輸出電壓的穩(wěn)定性,可滿足工程應(yīng)用的需要。
結(jié) 語
本文根據(jù)便攜式發(fā)電機(jī)在使用過程中輸出電壓不穩(wěn)定的實(shí)際問題,組建了一套以行波型超聲波電動機(jī)為執(zhí)行機(jī)構(gòu)的自動控制系統(tǒng)。通過該系統(tǒng)的調(diào)節(jié),有效地穩(wěn)定了發(fā)電機(jī)的輸出電壓,提高了汽油發(fā)電機(jī)的工作效率。總結(jié)全文,可得如下三點(diǎn)結(jié)論:
(1)行波型超聲波電動機(jī)的優(yōu)點(diǎn)在本系統(tǒng)中得以充分的發(fā)揮。TRUM-45型超聲波電動機(jī)達(dá)到實(shí)用水平,結(jié)構(gòu)靈活,可直接設(shè)計成工程中的伺服執(zhí)行機(jī)構(gòu),特別適用于小型智能閥門的控制。
(2)該控制系統(tǒng)的數(shù)學(xué)模型的建立具有很大的難度,選擇魯棒性強(qiáng)的模糊控制方法,可以使控制算法簡單,同時又能達(dá)到很好的控制效果。但在控制目標(biāo)的選擇上如能考慮超聲波電動機(jī)本身的特性,如選擇控制兩相驅(qū)動電壓的相位差和控制驅(qū)動電壓的幅值相結(jié)合,則可實(shí)現(xiàn)控制性能的進(jìn)一步優(yōu)化。
(3)如果根據(jù)本研究的結(jié)果,運(yùn)用單片機(jī)或DSP技術(shù)對系統(tǒng)進(jìn)行集成化、小型化,就可以廣泛應(yīng)用到工程實(shí)踐中去。
電焊機(jī)")
碼變頻發(fā)電機(jī)")
電機(jī)產(chǎn)品")
最新產(chǎn)品
同類文章排行
- 汽油發(fā)電機(jī)優(yōu)勢出現(xiàn)高溫報警的原因
- 如何選購發(fā)電機(jī)蘊(yùn)含大大的能量
- 柴油水泵常見故障為何排氣管有時滴油
- 汽油和柴油發(fā)電機(jī)組區(qū)別日常啟動步驟
- 汽油發(fā)電機(jī)用途“心臟”如何保養(yǎng)
- 汽油發(fā)電機(jī)是否省油如何接線安全
- 汽油發(fā)電機(jī)優(yōu)勢磨合期如何安全度過
- 小型汽油發(fā)電機(jī)優(yōu)點(diǎn)柴油發(fā)電機(jī)特點(diǎn)
- 汽油發(fā)電機(jī)選購起動前準(zhǔn)備檢查
- 汽油發(fā)電機(jī)“燙護(hù)秘方”冷卻液溫度偏高解決
最新資訊文章
您的瀏覽歷史

